IRENA
I always wanted to build a robot. During my school career I once got the chance to write a physics term paper with the topic “Navigation of mobile robots via infra red emission”, which included a practical part, to underline the theory. I dedicated that practical part to the fulfillment of my “dream” of developing an autonomous robot.
IRENA is an acronym for “Infra Red Emission Navigated Automat”. It has the capability to navigate towards an IR light source while evading obstacles on its way.
Technical Implementation
The first task is accomplished via an IR photo diode amplified by a TLC272 connected to the microcontroller’s AD converter. For obstacle detection I created 4 modules which consist of an IR LED and an IS471F each. The IS471F is capable of both: generating a pulsed signal to be emitted by the LED and detecting it’s reflections. Due to its pulsed nature the IR bursts are less vulnerable to disturbances and allow the LED to be driven with a higher voltage which increases the sensor’s range.
IRENA’s “brain” is an Atmel ATMEGA32 which was affordable, yet powerful enough for the desired task. After being rather unsatisfied with BASCOM, a Basic dialect for microcontrollers, I researched on how to program Atmel controllers in C, which gave me all freedoms I needed and a good development workflow.
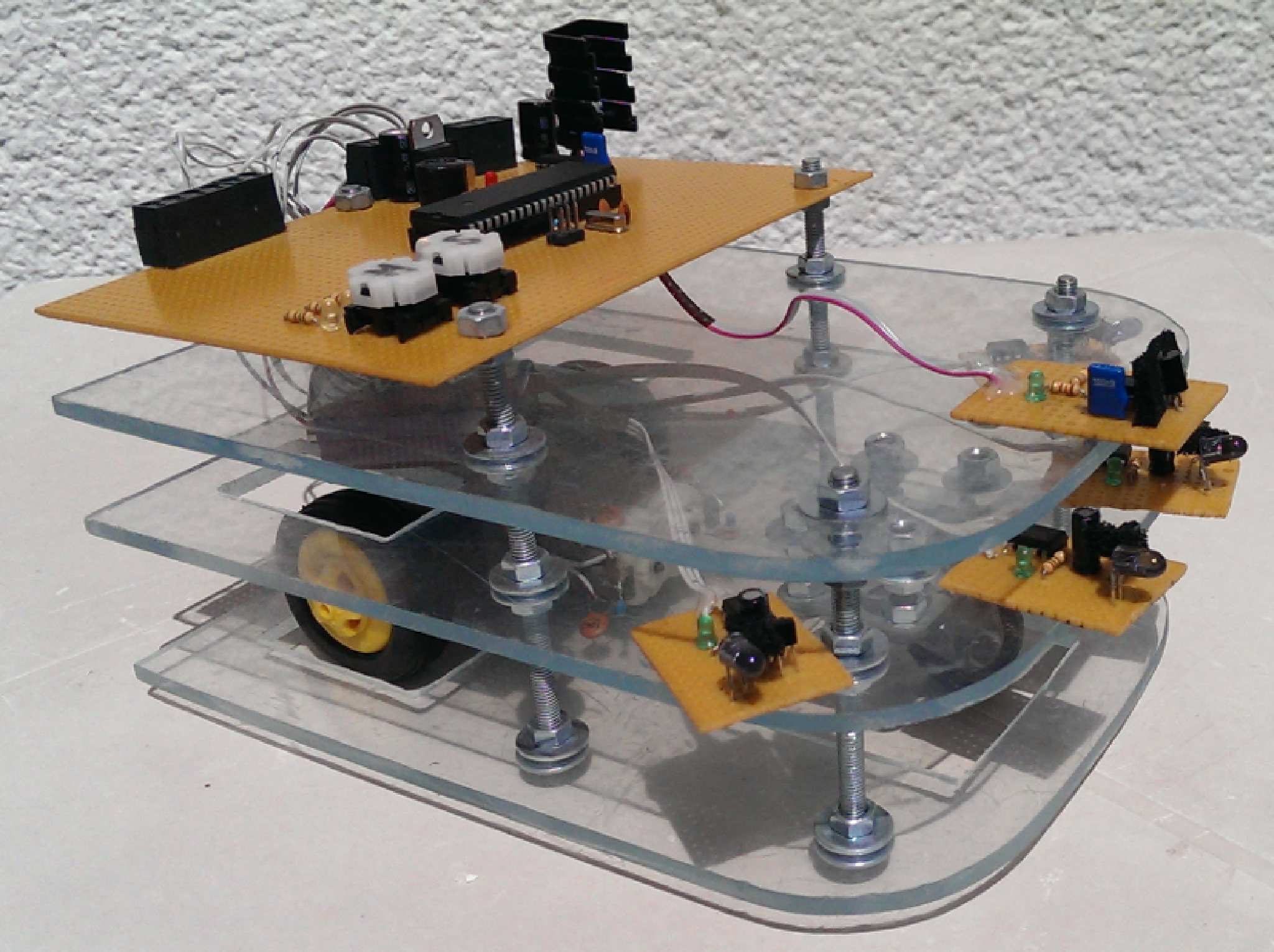
Besides electronics and code there is hardware needed for a robot to function. As I had no experience in that field I decided to use a simple assembly kit for the motor and designed an easily implementable setup, consisting of multiple layers of acrylic glass, that turned out to serve the purpose very well.